機体の中のIMUに誤差が生じ、水平の認識にズレが発生している可能性があります。
以下の手順にて、水平キャリブレーションを行い改善するかお試しください。
【水平キャリブレーション方法】
予め、ゴーグル・送信機・機体の接続を行います。
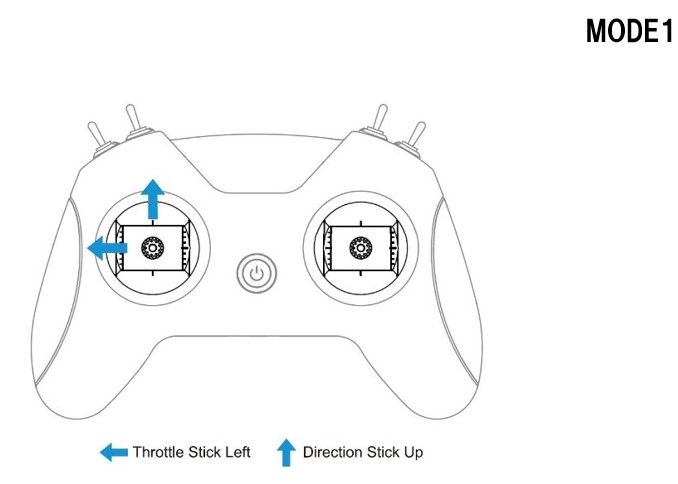
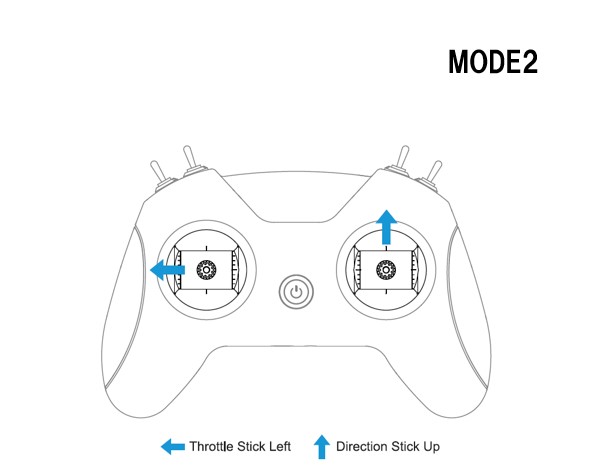
- 画像のようにスティックを同時に倒す モード1とモード2ではやり方が異なりますので、以下の画像をご確認いただき、それぞれのモードに合うようにスティックを倒してください。
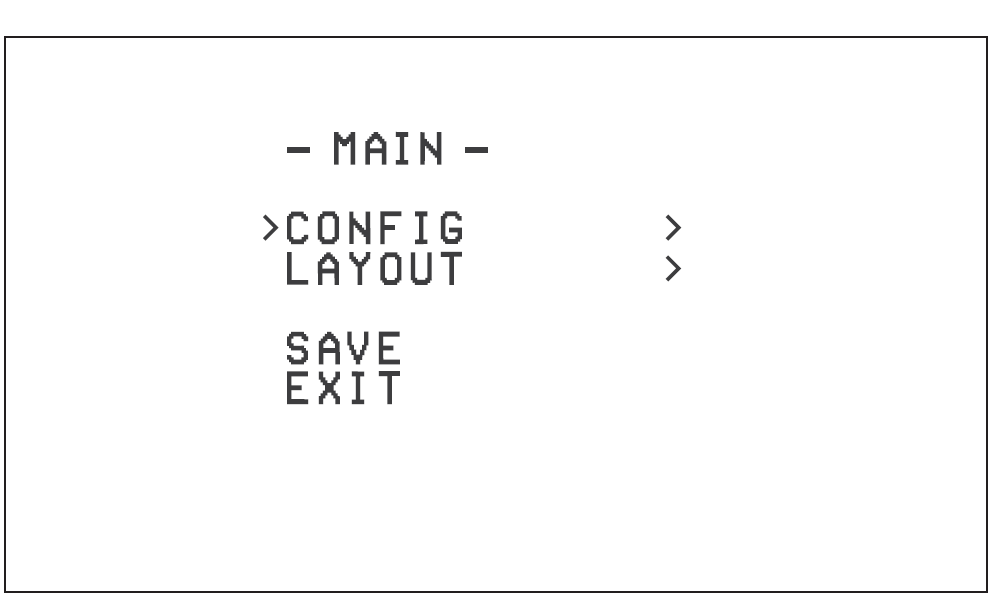
- ゴーグルに画像2のように表示されますので、機体を水平面に置き、「CONFIG」→「CALI」を選択しキャリブレーションを行います。
- 完了後、「BACK」を選択し、「SAVE」を押して電源を入れなおします。 水平キャリブレーション後、最初は不安定な状態になる場合がございますが、しばらく飛行させていると安定するようになります。
※飛行時の姿勢を機体が確認するため、最初は不安定な状態になる場合がございます。